







ניצן די T5L שפּאָן ווי די הויפּט קאָנטראָל און T5L שפּאָן דרייווז די סיריאַל ויטאָבוס סערוואָ צו קאָנטראָלירן די טיר באַשטימען, און פּראַסעסאַז די סענסער דאַטן געזאמלט דורך די אַגזיליערי קאָנטראָללער, און דרייווז די לקד פאַרשטעלן פֿאַר דאַטן אַרויסווייַזן.עס האט אַן אַבנאָרמאַל ווארענונג פֿונקציע און אַן אָטאַמאַטיק לייטינג סיסטעם, וואָס קענען זיין געוויינט נאָרמאַלי אין די טונקל ליכט סיטואַטיאָנס.
1. פּראָגראַם באַשרייַבונג
(1) די T5L פאַרשטעלן איז געניצט ווי די הויפּט קאָנטראָל צו גלייך פאָר די סיריאַל ויטאָבוס סערוואָ.ניצן Feite STS סעריע סטירינג גאַנג, די טאָרק ריינדזשאַז פון 4.5 קג צו 40 קג, און דער פּראָטאָקאָל איז וניווערסאַל.
(2) די סיריאַל ויטאָבוס סטירינג גאַנג האט קראַנט, טאָרק, טעמפּעראַטור און וואָולטידזש שוץ פאַנגקשאַנז, און זייַן זיכערקייַט איז העכער ווי אַז פון קאַנווענשאַנאַל מאָטאָרס;
(3) איין סיריאַל פּאָרט שטיצט סיימאַלטייניאַס קאָנטראָל פון 254 סערוואָז.
2.סקימע פּלאַן
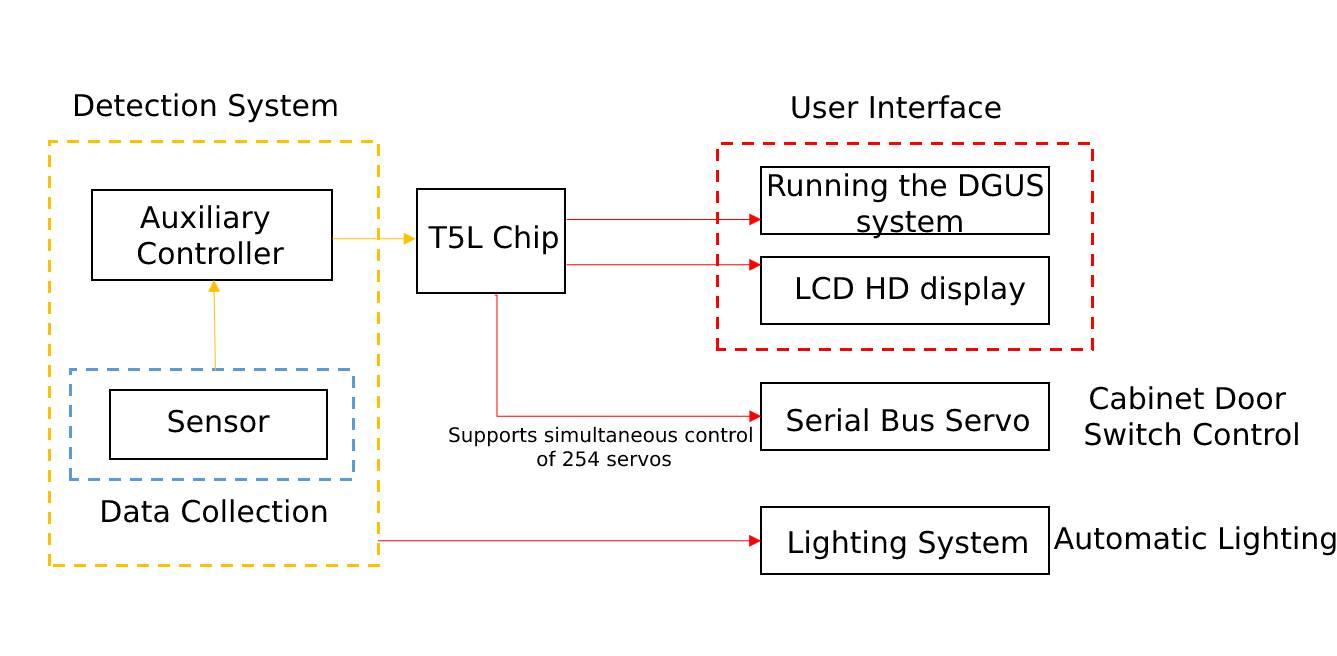
(1) סכעמע בלאָק דיאַגראַמע
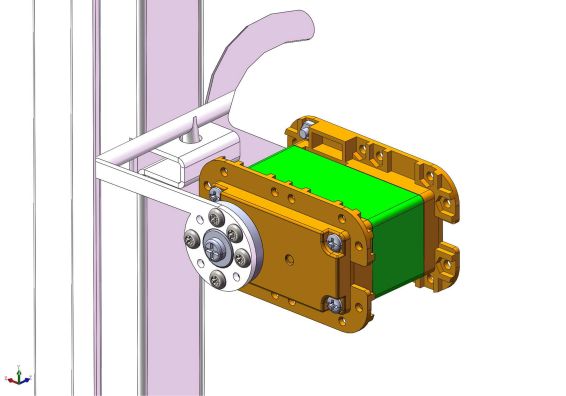
(2) מעטשאַניקאַל סטרוקטור דיאַגראַמע
אין סדר צו פאַרמייַדן די מאַכט דורכפאַל פון די ינטעליגענט קאַבינעט טיר פון זיין אויס פון קאָנטראָל, דעם פּלאַן אַדאַפּץ אַ צווייענדיק סטירינג גאַנג פּלאַן.נאָך אַ מאַכט דורכפאַל, רעכט צו דער עקזיסטענץ פון די טיר לאַטש, אפילו אויב די טיר עפן סערוואָ איז אַנלאָודיד, די קלוג קאַבינעט איז נאָך אין די פארשפארט שטאַט.די מעטשאַניקאַל סטרוקטור איז געוויזן אין די פיגור:
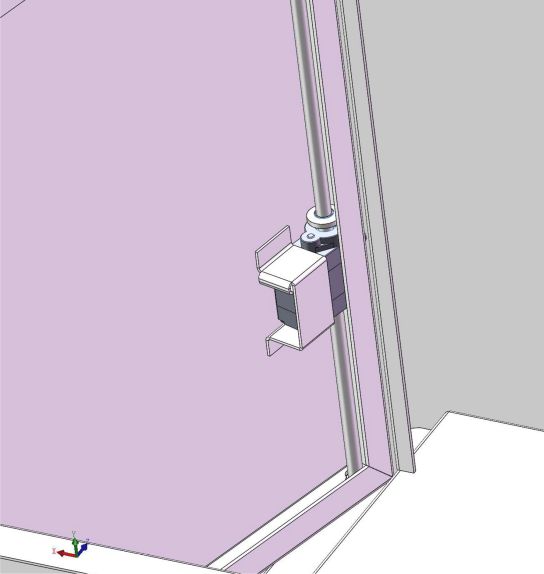
דיאַגראַמע פון די עפן סטרוקטור
דיאַגראַמע פון דיקלאָוזינג סטרוקטור
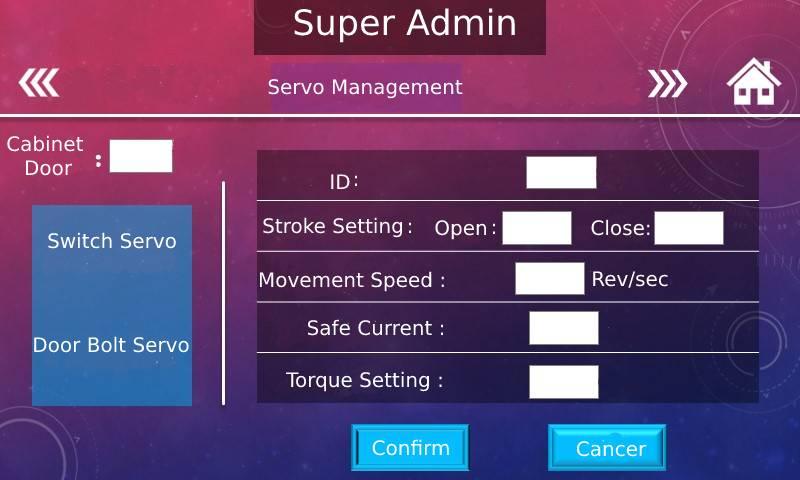
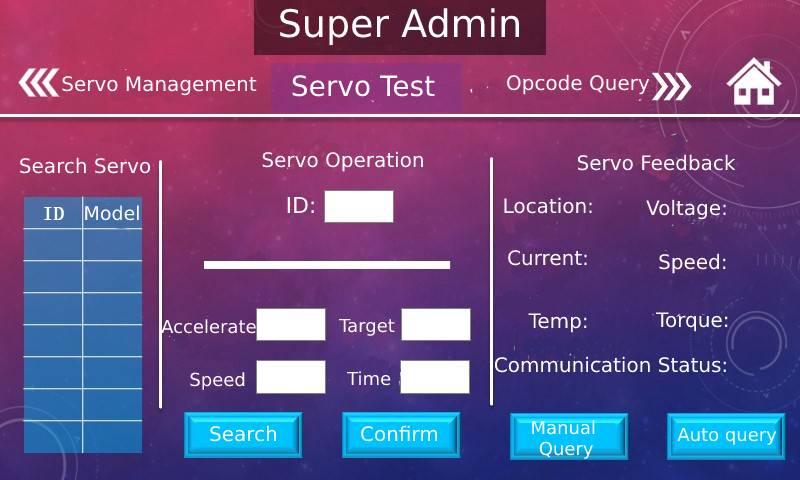
(3) DGUS GUI Design
(4) קרייַז סכעמאַטיש
די קרייַז סכעמאַטיש איז צעטיילט אין דרייַ טיילן: די הויפּט קרייַז ברעט (סערוואָ פאָר קרייַז + אַגזיליערי קאָנטראָללער + צובינד), סטעפּ-אַראָפּ קרייַז, און לייטינג קרייַז (אינסטאַלירן אין די קאַבינעט).
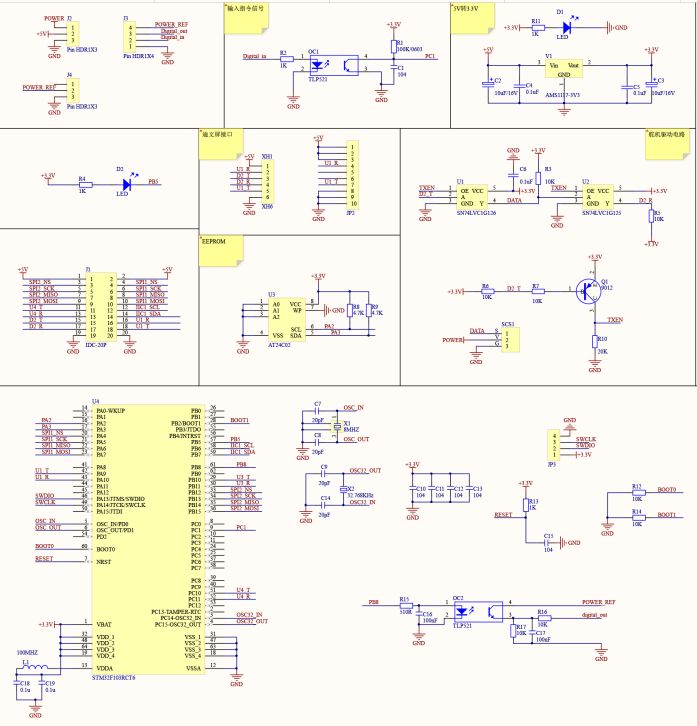
הויפּט קרייַז באָרד
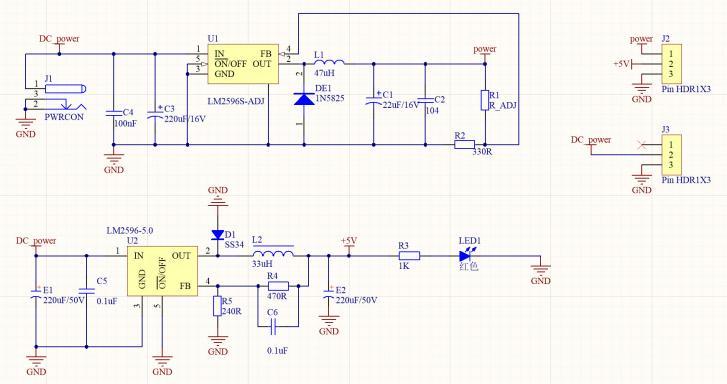
שריט-אַראָפּ קרייַז
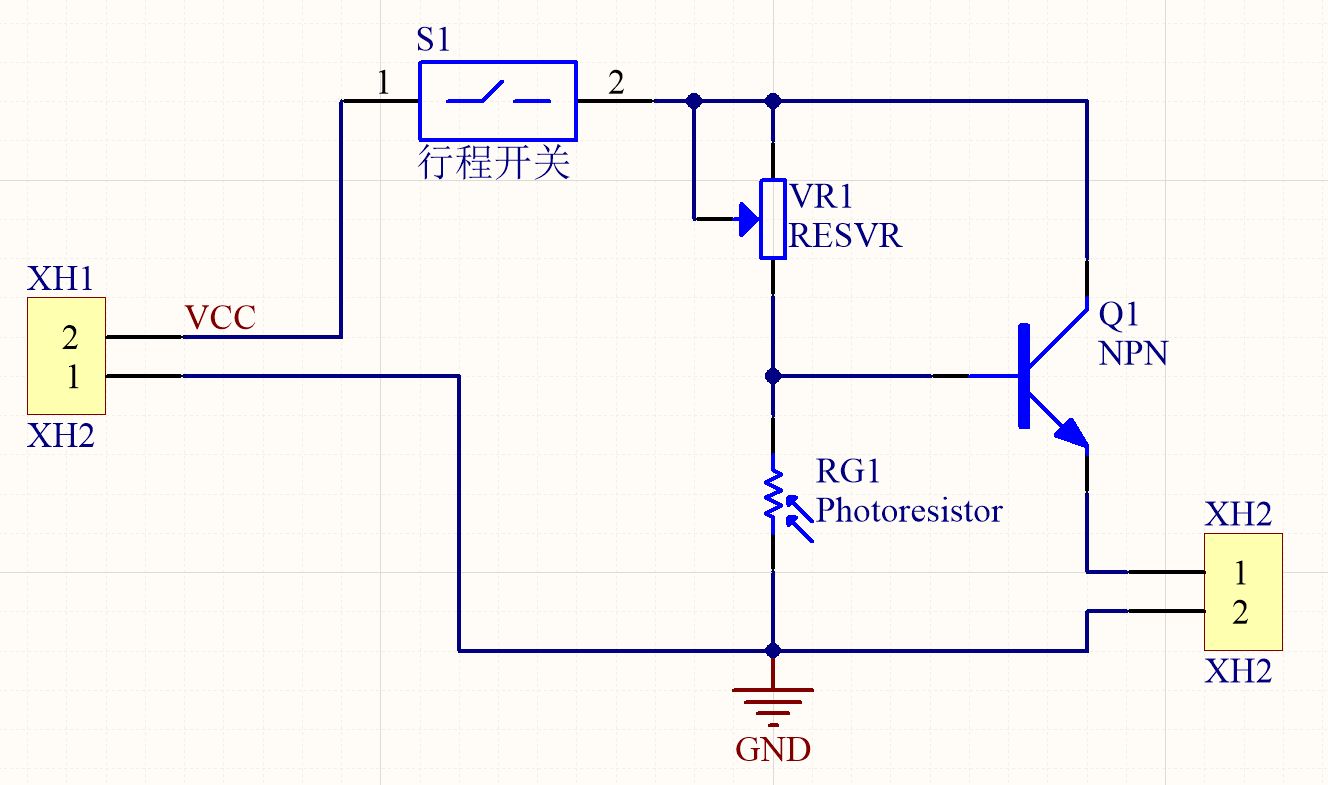
ליגהטינג קרייַז
5. פּראָגראַם בייַשפּיל
טעמפּעראַטור און הומידיטי דיטעקשאַן און דערפרישן, צייט דערהייַנטיקן (AHT21 איז געטריבן דורך די אַגזיליערי קאָנטראָללער, און די טעמפּעראַטור און הומידיטי דאַטן זענען געשריבן אין די DWIN פאַרשטעלן)
/***************** טעמפּעראַטור און הומידיטי דערהייַנטיקן***********************/
void dwin_Tempe_humi_update (וואָיד)
{
uint8_t Tempe_humi_date[20];// קאַמאַנדז געשיקט צו די לקד פאַרשטעלן
AHT20_Read_CTdata(CT_Data);// לייענען טעמפּעראַטור און הומידיטי
Tempe_humi_date[0]=0x5A;
Tempe_humi_date[1]=0xA5;
Tempe_humi_date[2]=0x07;
Tempe_humi_date[3]=0x82;
Tempe_humi_date[4]=(ADDR_TEMP_HUMI>>8)&0xff;
Tempe_humi_date[5]=ADDR_TEMP_HUMI&0xff;
Tempe_humi_date[6]=((CT_data[1] *200*10/1024/1024-500)>>8)&0xff;
Tempe_humi_date[7]=((CT_data[1] *200*10/1024/1024-500))&0xff;// רעכענען די טעמפּעראַטור ווערט (ענלאַרגעד מיט 10 מאל, אויב t1=245, עס מיטל אַז די טעמפּעראַטור איז איצט 24.5 °C)
Tempe_humi_date[8]=((CT_data[0]*1000/1024/1024)>>8)&0xff;
Tempe_humi_date[9]=((CT_data[0]*1000/1024/1024))&0xff;// רעכענען די הומידיטי ווערט (מאַגניפיעד 10 מאל, אויב c1=523, עס מיטל אַז די הומידיטי איז 52.3% איצט)
Usart_SendString(USART_DWIN,טעמפּע_הומי_דאַטע,10);
}
פּאָסטן צייט: נאוועמבער-08-2022